{kind=link}
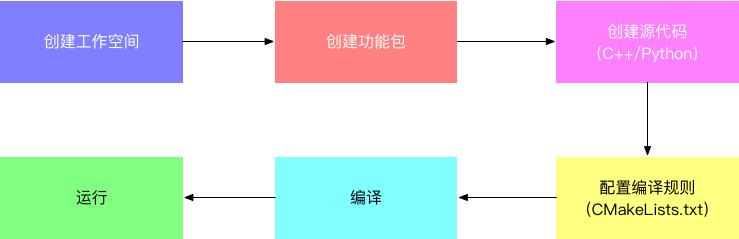
当创建的源代码是Python的时候,是不需要编译的,直接运行就可以了。
工作空间(workspace)是一个存放ROS工程开发相关文件的文件夹。
- src: 代码空间
- build: 编译空间,存放编译时生成的中间文件,二进制文件
- devel: 开发空间,存放终止编译的可执行文件和环境变量;
- install: 安装空间,最终生成的可执行文件,与devel有点类似,但包行了安装指令,ROS编译结果最终安装的地方,类似Windows的Program Files
创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
catkin_ws是catkin workspace的意思;catkin是ROS编译器。
catkin_init_workspace指令初始化工作空间,生成CMakeLists.txt文件。让src成为代码空间,让catkin_ws成为具有ROS属性的工作空间。
编译工作空间
cd ~/catkin_ws
catkin_make
由于没写代码,现在编译只能测试是否配置成功。看编译输入日志,其实没有任何编译内容的。会自动产生build和devel文件夹。
catkin_make命令必须在工作空间的根目录下执行。
产生的devel文件夹里面存放了当前工作空间的环境变量。
设置环境变量
source devel/setup.zsh
笔者用的是zsh终端,所以source的是setup.zsh,如果用的是Ubuntu默认的bash,source devel/setup.bash就可以了。le
检查环境变量
echo $ROS_PACKAGE_PATH
执行后在笔者电脑上输出了/home/tangjz-ros/catkin_ws/src:/opt/ros/melodic/share,表示环境变量设置正确。
产生install文件夹
catkin_make install
内容几乎跟devel一样。